


Somos un dos provedores de FA one-stop máis profesionais da China. Os nosos principais produtos inclúen servomotores, caixas de engrenaxes planetarias, inversores e PLC, HMI. Marcas como Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron e etc.; Tempo de envío: dentro de 3-5 días hábiles despois de recibir o pago. Forma de pago: T/T, L/C, PayPal, West Union, Alipay, Wechat e así sucesivamente.
Detalle das especificacións
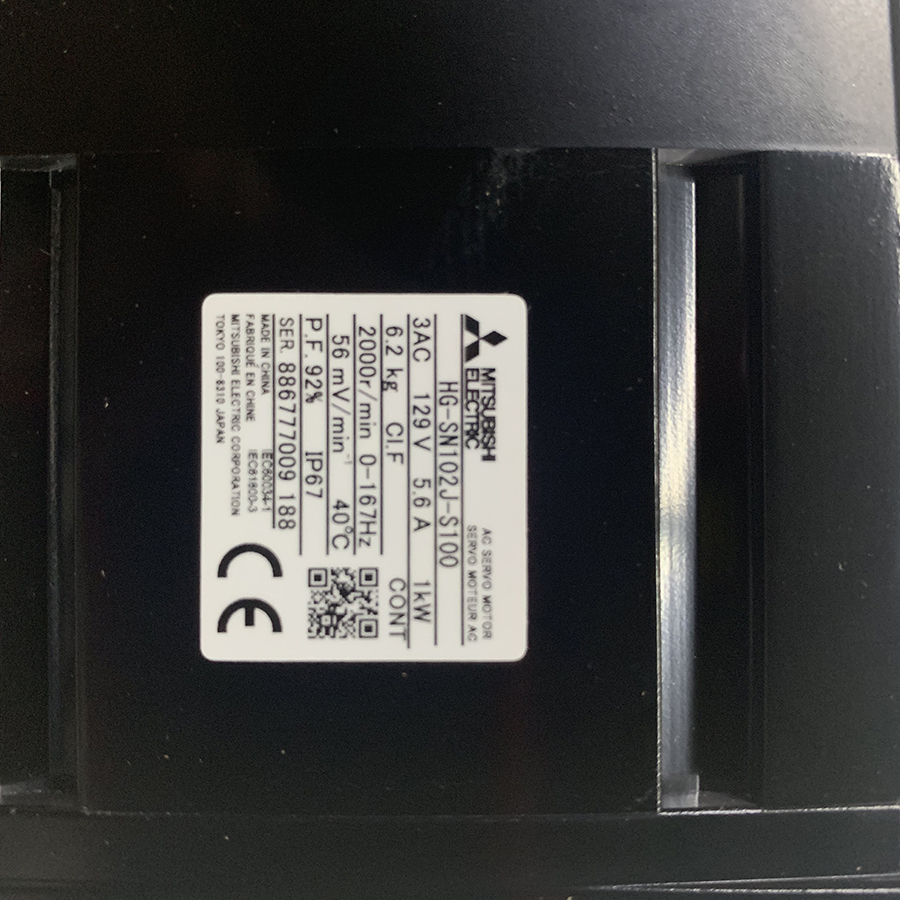
| Elemento | Especificacións |
| Modelo | HG-SN102J-S100 |
| Marca | Mitsubishi |
| Nome do produto | Servomotor de CA |
| Poder | 5,0 kW |
| Voltaxe | 400 V |
| Frecuencia | 900 (kHz) |
| Serie de produtos / nome da familia | Serie MELSERVO JE |
| corrente nominal | 5,6A |
| potencia activa nominal | 1000 W / 1 kW |
| Grao de protección | IP67 |
| corrente máxima | 17 A |
| Carga radial máxima | 980 N |
| Carga axial máxima | 490 N |
| Par nominal | 4,77 Nm |
| Par máximo | 14,3 Nm |
| Resolución | 17 bits |
| Tamaño | 130 mm x 130 mm x 132,5 mm |
| Peso neto | 6,2 kg |
Un sinal de CA constante como entrada subministrase ao enrolamento principal do estator. Non obstante, como o nome indica, o enrolamento de control recibe a tensión de control variable. Esta tensión de control variable obtense do servoamplificador. Cómpre sinalar aquí que para ter un campo magnético rotatorio, a tensión aplicada ao enrolamento de control debe estar 90° desfasada con respecto á tensión de CA de entrada.
Rotor: O rotor é xeralmente de dous tipos; un é do tipo gaiola de esquío mentres que o outro é do tipo copa de arrastre.
O tipo de rotor de gaiola de esquío móstrase a continuación: rotor de gaiola de esquío Neste tipo de rotor, a lonxitude é grande mentres que o diámetro é pequeno e está construído con condutores de aluminio, polo que pesa menos. Cómpre sinalar aquí que as características de par-velocidade dun motor de indución normal teñen rexións de pendente tanto positivas como negativas que representan rexións inestables e estables, respectivamente.
Non obstante, os servomotores de CA están deseñados para posuír unha alta estabilidade, polo que as súas características de deslizamento de par non deben ter unha rexión de deslizamento positiva. Ademais, o par desenvolvido no motor debe reducirse de forma lineal coa velocidade.
Para conseguilo, a resistencia do circuíto do rotor debe ter un valor alto e baixa inercia. Por este motivo, ao construír o rotor, a relación diámetro-lonxitude mantense pequena. Os espazos de aire reducidos entre as barras de aluminio no motor de gaiola de esquío facilitan unha redución da corrente de magnetización.
Acerca da serie J4 de Mitsubishi:
Para responder a unha gama cada vez maior de aplicacións, incluíndo a fabricación de semicondutores e LCD, robots e máquinas de procesamento de alimentos, MELSERVO-J4 combínase con outras liñas de produtos de Mitsubishi Electric, como controladores de movemento, redes, terminais de operación gráfica, controladores programables e moito máis. Isto ofrécelle a liberdade e a flexibilidade para crear un sistema servo máis avanzado.
-Acerca da serie J5 de Mitsubishi:
(1) Progresividade
Pola evolución das máquinas
Mellora do rendemento
Estandarización do programa
(2) Conectividade
Para un sistema flexible
Configuracións
Integración con dispositivos conectables
(3) Usabilidade
Para un inicio rápido da operación
Mellora da ferramenta
Mellora da usabilidade do sistema de accionamento
(4) Mantenibilidade
Para unha detección inmediata e
diagnóstico de fallos
Mantemento preditivo/preventivo
mantemento correctivo
(5) Patrimonio
Para o aproveitamento dos existentes
(6) dispositivos
Intercambiabilidade con anteriores
(7) modelos de xeración
-Acerca da serie JET Mitsubishi
-Acerca da serie JE Mitsubishi
-Acerca da serie JN Mitsubishi
-

MR-J2S-70B-PY135U054 Mitsubishi accionamento para servo...
-

Controlador de amplificador Mitsubishi orixinal MR-J3-100B
-

Servomotor Mitsubishi HF-KR13BJ Motor xaponés
-

Servocontrolador Mitsubishi novo e orixinal do Xapón...
-

Servocontrolador Mitsubishi Xapón MR-JE-100A
-

Servomotor de CA Mitsubishi MR-J2S-60A4




